鳥人間サークルWASAにて製作した電装システム
システムの概要
人力飛行機を操作する方法として,ワイヤーリンケージと呼ばれるワイヤーにより直接尾翼を操作する方法と,フライバイワイヤと呼ばれるジョイスティックとサーボモータを用いた電子制御の二つの方法があります.フライバイワイヤ方式では,すべてが電子制御されているため,フライトログ取得の簡便さや操舵基準角度の微調整が容易であるという 特徴があり,自チームもフライバイワイヤ方式を採用しました.
自身は,パイロットの操舵角に合わせ、尾翼を電気的に制御する操舵部分と、機体上のセンサで取得した各種データをパイロット用のスマホに表示すると共に、ログ取得用のPCにデータを送信する計測部分の両システムを開発しました.
説明資料
電装システムの紹介
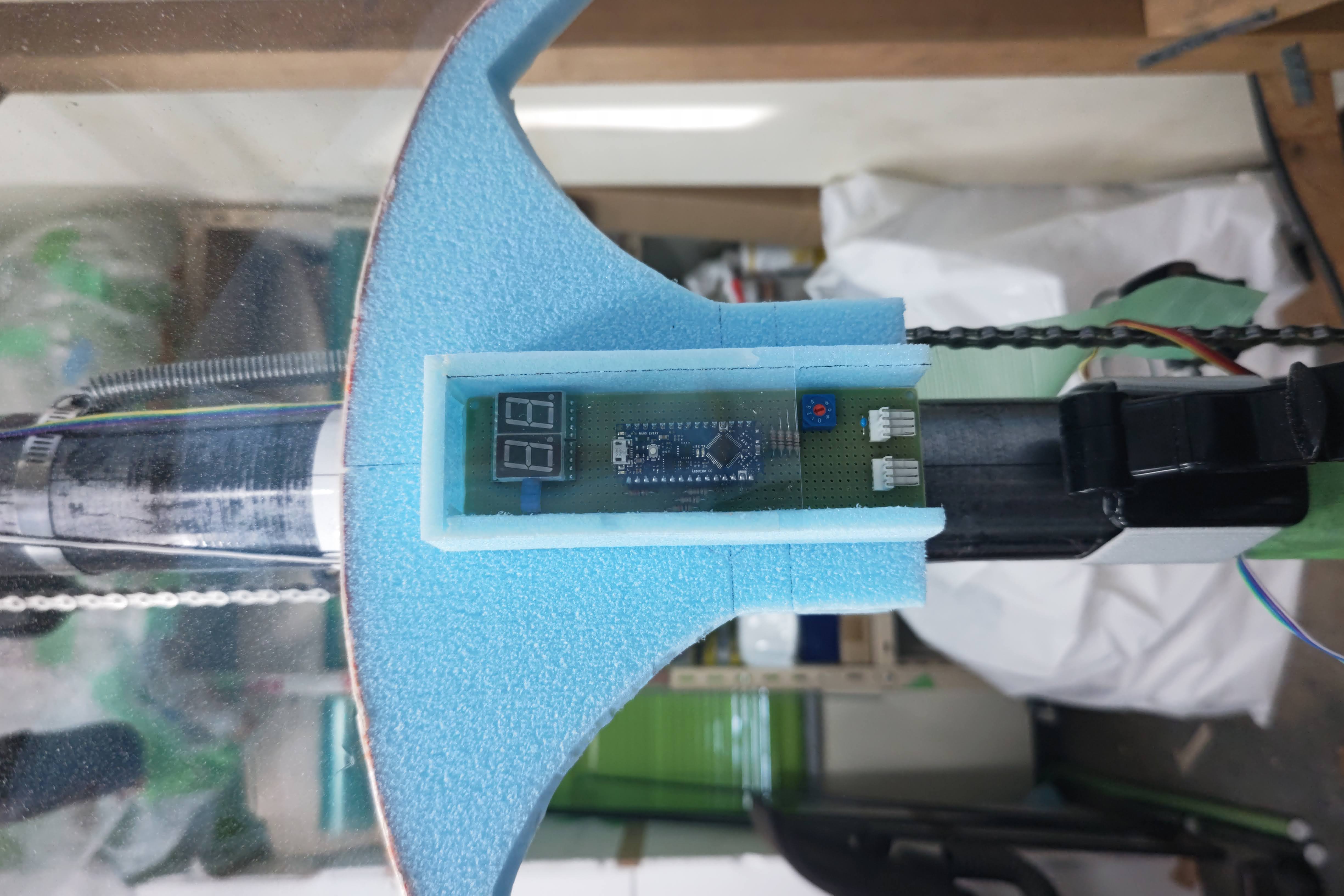
操舵部について
ジョイスティック操作時の電圧の変化を入力として,シリアルコマンド方式のサーボモータを操作することができます.サーボモータのPID調整を行うことで,尾翼が発振しないようになっています.フライトを長時間行うためには,飛行中に風やパイロットの体力に合わせて,尾翼の迎角を0.1度単位で調整して浮力と抗力のバランスを保たなければなりません. そこで,操舵部に付いたスイッチにて,サーボモータの基準角度を変更できるようになっています.また,振動や強風により,マイコンの電源が瞬間的に落ちてしまうことを想定し,基準角度は不揮発メモリに保存されるようになっています.
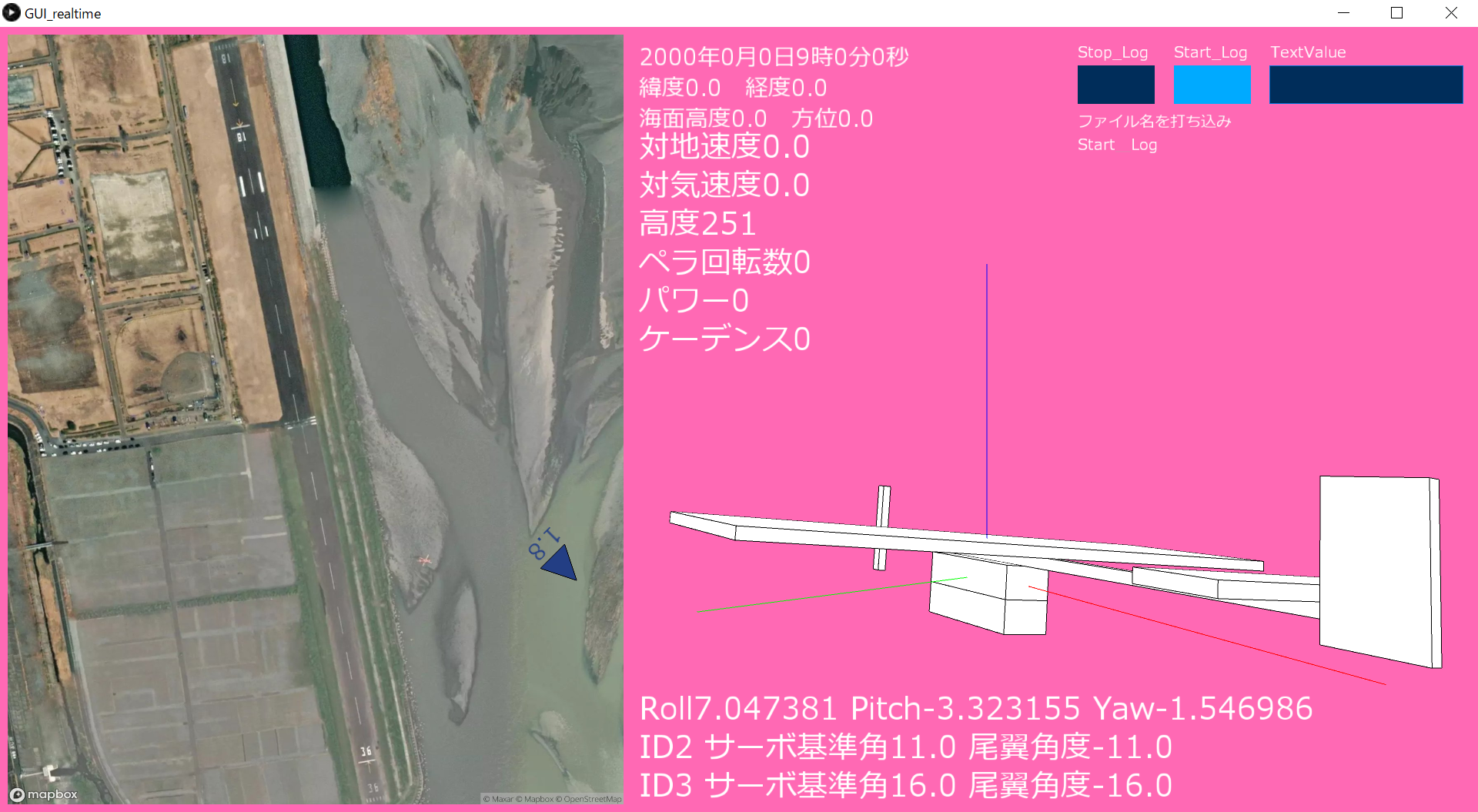
計測部について
機体の速度・プロペラ回転数・位置座標・機体の傾き・水面からの高度を機体に取り付けたセンサ網から取得し,Xbeeを用いて外部のPCに送信しています.PC上ではProcessingでコーディングされたアプリケーションが動作し,機体の情報を遠隔で知ることができるます.バックグラウンドではCSVファイルとしてログの取得を行っていました. これら機体の情報は,パイロットの目の前にあるスマホにも転送され,スマホアプリで表示される情報を元にパイロットは飛行します.
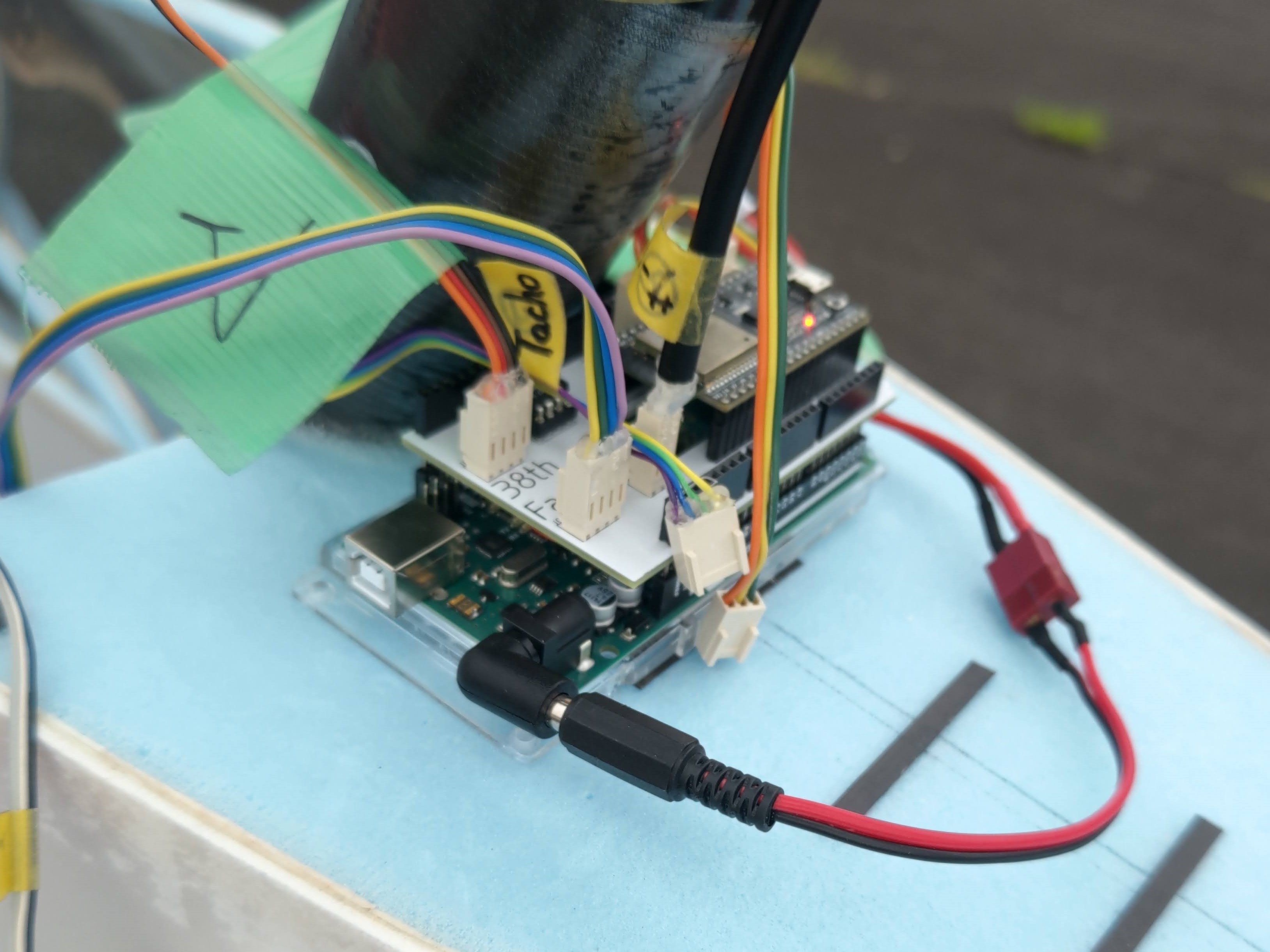
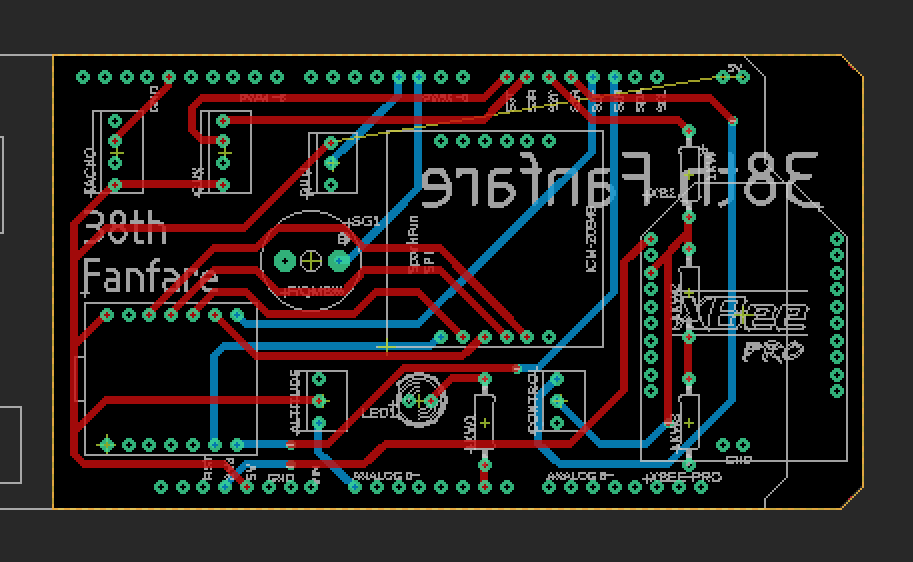
回路について
操舵部と計測部を実現するためには,マイコンと多くのセンサや電子部品を接続する必要がありました.そのため,多数のコネクタや部品を搭載するための変換基板をEagleCADにて自作しました. 機体の各部にセンサやモータがあるため,長いケーブルは5m程にもなりました.そのため,少しでも重量を削減するため,ケーブル長をcm単位で管理し,特に長いケーブルに関しては軽量なアルミケーブルを採用しました.
コーディングについて
Arduinoを用いてプログラミングを行いました.各センサごとのプログラムを別々のファイルとして作成し,それらファイルを,メインのプログラムでまとめて実行するようにコーディングしたため,機能の追加・変更が容易に行えました. ESP32というマイコン上で立ち上がったWebサーバーにアクセスする形で,スマホ間との通信を行い,ビットシフトにより変換されたバイト配列に,専用のヘッダとフッタを接続してXbeeに流すことで,PCとの通信を行っていました.